Project Frankensapien – Part 1
Years ago I was given a shiny, silver Robosapien. It’s an awesome humanoid robot controlled and programmed with an infrared remote. Unfortunately with 90+ commands and functions the remote is pretty cumbersome. So I always intended to see if I could put something together to control him from a PC, but I never got around to doing it.

My 5 year old is in his first year of school and since he now has some basic reading skills I thought I’d try to introduce him to programming. Initially I tried out Scratch and whilst he loved playing with the outputs the UI was too abstract and complex for him to grok. However he is enamored with robots, gears, motors and inventions, so I figured that controlling something physical with a simple set of commands would work better for him.
And so Project Frankensapien was born.
First off I decided that I didn’t want to do anything invasive to the Robosapien (now know as Frank). This means that my interface to him would need to be via IR, emulating his remote control. Secondly I want to be able to control him from a PC to shorten the development and testing/hacking cycle. Additionally I’d like to play with some computer vision stuff and I figured that I’d go RoboCup styles, using the processing grunt of the PC as the brains of the robot and broadcasting simple instructions to the robot to carry out.
Lastly I’d like to try make Frank autonomous by strapping a Raspberry Pi to him!
With this in mind I purchased an USB Infrared Toy v2. Its USB interface means it can be plugged into my PC and into the Raspberry Pi. The device is also both an IR receiver and transmitter which means I can use it to record, analyse and emulate the IR command sequences sent by Frank’s remote.
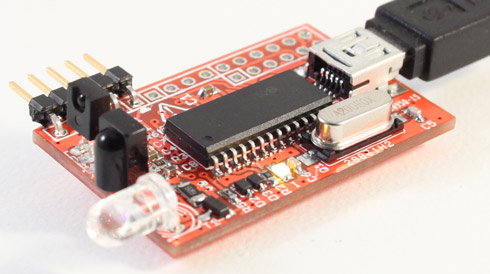
The first step in the project was to be able to send Frank’s commands via the USB Infrared Toy. To do this I settled on trying to get WinLIRC up and running. This software is a Windows port of LIRC and provides tools to capture and execute IR commands. Better yet it has direct support for the USB Infrared Toy and its config files are compatible with LIRC so I should be able to use the same configuration files on the Raspberry Pi.
Installation of the USB Infrared Toy was pretty straight forward, I just followed the instructions detailed on the dangerousprototypes website. Next I downloaded WinLIRC and a LIRC configuration for the Robosapien I found on the web (I had to retrieve the file from the Wayback Machine as it had fallen off the Internet).
I fired WinLIRC up and… nada. It did not like the configuration at all :( Additionally the COM port for the USB Infrared Toy (yes, you talk to the USB Infrared Toy via a serial over USB connection) kept disappearing on me. Things were not looking good at all.
After digging around on the web I found that I could use the IRGraph to get a visualization of what the USB Infrared Toy is receiving. This generated a graph looking like this:
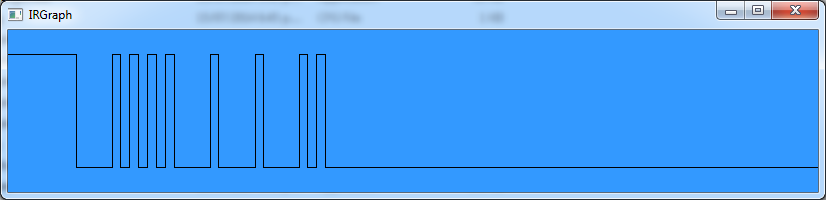
and showed that the toy was able to read the IR commands sent by Frank’s remote.
Next up I tried to use the IRRecord tool to record commands from Frank’s remote and then generate a LIRC config file. The tool seemed to have real issues dealing with the Robosapien remote and the config file that it generated did no work. It did however generate a good config for my Samsung TV remote.
Looking at the software for the USB Infrared Toy, I discovered a tool called irtoy that records and plays back IR commands. So I thought I’d give this a try. Unfortunately it required a firmware update and when I tried the update it got stuck in bootloader mode and I could not access the USB Infrared Toy! After some cursing and switching of USB ports (and waiting), windows finally found the toy (which turns into a USB human interface device in bootloader mode) and I was able to complete the firmware upgrade. Phew!
The irtoy tool recorded and played back a command so further confirmed that the USB Infrared Toy could be used to communicate with Frank. So (slightly in frustration) I bought a copy of AnalysIR which apparently supported LIRC export and the USB Infrared Toy.
Whilst I waited for the license key for AnalysIR, I figured I’d try to roll a config by hand. Using info gleaned from the following links:
I put together a config file that only handled the STOP command, fired it up and got Frank to… fart! (the OOPS command). Which was pretty funny but also slightly indicative of my feelings towards my efforts so far.
Comparing the bitmasks of the STOP and OOPS commands, I didn’t see much correlation. I figure I just got lucky and managed to send some junk that Frank managed to understand.
0x8E - 10001110 - STOP
0xC7 - 11000111 - OOPS (Fart)
However I did get something useful out another of WinLIRC’s tool, RawCodes, when pressing the STOP button on Frank’s remote:
SPACE 16777215
PULSE 6741
SPACE 3605
PULSE 789
SPACE 917
PULSE 853
SPACE 917
PULSE 831
SPACE 938
PULSE 831
SPACE 3605
PULSE 789
SPACE 3626
PULSE 789
SPACE 3647
PULSE 789
SPACE 895
PULSE 853
Mapping the long spaces to 1’s and the short ones to 0’s I was able to figure out that:
- The first space is just an artifact of the tool
- The next pulse+space were long, acted as a header and the first bit and was always a 1
- One’s were a short pulse and a long space
- Zero’s were a short pulse and a short space
- There was a single short pulse at the end of the sequence
- The commands were thus 7 bits long (not including the header)
So I coded up the following config file and gave it a whirl:
begin remote
name Robosapienv1
frequency 39200
header 6666 3550
bits 7
eps 30
aeps 100
one 833 3333
zero 833 833
foot 833 16777215
begin codes
STOP 0x8E
end codes
end remote
Success! Next I used the data on the RoboSapien IR Codes page to get the rest of the commands and added them to the file:
# WinLirc/Lirc config to control V1 Robosapien
#
# Testing with WinLirc and USB Infared Toy V2
#
# from http://www.markcra.com/robot/ir_codes.php
# and http://lirc.10951.n7.nabble.com/robosapien-config-td272.html
# and http://daverobertson63.wordpress.com/2013/05/05/updated-robosapien-ir-control-arduino/
begin remote
name Robosapienv1
frequency 39200
header 6666 3550
bits 7
eps 30
aeps 100
one 833 3333
zero 833 833
foot 833 833
begin codes
# movement commands (no shift)
TURN_RIGHT 0x80
RIGHT_ARM_UP 0x81
RIGHT_ARM_OUT 0x82
TILT_BODY_RIGHT 0x83
RIGHT_ARM_DOWN 0x84
RIGHT_ARM_IN 0x85
WALK_FORWARD 0x86
WALK_BACKWARD 0x87
TURN_LEFT 0x88
LEFT_ARM_UP 0x89
LEFT_ARM_OUT 0x8A
TILT_BODY_LEFT 0x8B
LEFT_ARM_DOWN 0x8C
LEFT_ARM_IN 0x8D
STOP 0x8E
# Programming commands (no shift)
MASTER_COMMAND_PROGRAM 0x90
PROGRAM_PLAY 0x91
RIGHT_SENSOR_PROGRAM 0x92
LEFT_SENSOR_PROGRAM 0x93
SONIC_SENSOR_PROGRAM 0x94
# Green shift commands
RIGHT_TURN_STEP 0xA0
RIGHT_HAND_THUMB 0xA1
RIGHT_HAND_THROW 0xA2
SLEEP 0xA3
RIGHT_HAND_PICKUP 0xA4
LEAN_BACKWARD 0xA5
FORWARD_STEP 0xA6
BACKWARD_STEP 0xA7
LEFT_TURN_STEP 0xA8
LEFT_HAND_THUMP 0xA9
LEFT_HAND_THROW 0xAA
LISTEN 0xAB
LEFT_HAND_PICKUP 0xAC
LEAN_FORWARD 0xAD
RESET 0xAE
EXECUTE_MASTER_COMMAND_PROGRAM 0xB0
WAKEUP 0xB1
EXECUTE_RIGHT_SENSOR_PROGRAM 0xB2
EXECUTE_LEFT_SENSOR_PROGRAM 0xB3
EXECUTE_SONIC_SENSOR_PROGRAM 0xB4
# Orange shift commands
RIGHT_HAND_STRIKE_3 0xC0
RIGHT_HAND_SWEEP 0xC1
BURP 0xC2
RIGHT_HAND_STRIKE_2 0xC3
HIGH_5 0xC4
RIGHT_HAND_STRIKE_1 0xC5
BULLDOZER 0xC6
OOPS_FART 0xC7
LEFT_HAND_STRIKE_3 0xC8
LEFT_HAND_SWEEP 0xC9
WHISTLE 0xCA
LEFT_HAND_STRIKE_2 0xCB
TALKBACK 0xCC
LEFT_HAND_STRIKE_1 0xCD
ROAR 0xCE
ALL_DEMO 0xD0
POWER_OFF 0xD1
DEMO_1_KARATE 0xD2
DEMO_2_RUDE 0xD3
DANCE 0xD4
end codes
end remote
Using the Transmit tool that comes with WinLirc I can now send Frank commands using the the USB Infrared Toy, for example:
Transmit Robosapienv1 HIGH_5
Transmit Robosapienv1 BURP
Transmit Robosapienv1 TURN_RIGHT
My favorite to date is the “pull my finger” script which programs Frank’s right touch sensor to OOPS when touched:
Transmit Robosapienv1 RIGHT_SENSOR_PROGRAM
Transmit Robosapienv1 OOPS_FART
Transmit Robosapienv1 PROGRAM_PLAY
Next up I plan to cobble together a simple web interface so that Frank can be controlled via a browser. Unfortunately the USB Infrared Toy’s range seems a bit limited (about 50cm max) so I may have to accelerate the plan to strap the Raspberry Pi to Frank so that I can keep the IR emitter permanently near his head. I also want to have a good play with AnalysIR tool, whose license turned up just as I succeeded in hand coding the LIRC config.